

![]()
![]()
![]()
pathviewr offers tools to import, clean, and visualize
movement data, particularly from motion capture systems such as Optitrack’s Motive,
the Straw Lab’s Flydra,
or other sources. We provide functions to remove artifacts, standardize
tunnel position and tunnel axes, select a region of interest, isolate
specific trajectories, fill gaps in trajectory data, and calculate 3D
and per-axis velocity. For experiments of visual guidance, we also
provide functions that use subject position to estimate perception of
visual stimuli.
You can install pathviewr from CRAN via:
install.packages("pathviewr")Or to get the latest (developmental) version through GitHub, use:
devtools::install_github("ropensci/pathviewr")pathviewrWe’ll also load two tidyverse packages for wrangling
& plotting in this readme.
library(pathviewr)
library(ggplot2)
library(magrittr)We will import and clean a sample data set from .csv
files exported by Optitrack’s Motive software. For
examples of how to import and clean other types of data, see
the Basics of data import and cleaning vignette.
## Import the Motive example data included in
## the package
motive_data <-
read_motive_csv(
system.file("extdata", "pathviewr_motive_example_data.csv",
package = 'pathviewr')
)Several functions to clean and wrangle data are available, and we
have a suggested pipeline for how these steps should be handled. For
this example, we will use one of two “all-in-one” functions:
clean_viewr(). See
the Basics of data import and cleaning vignette for the full
pipeline and the other “all-in-one” function.
motive_allinone <-
motive_data %>%
clean_viewr(
relabel_viewr_axes = TRUE,
gather_tunnel_data = TRUE,
trim_tunnel_outliers = TRUE,
standardization_option = "rotate_tunnel",
select_x_percent = TRUE,
desired_percent = 50,
rename_viewr_characters = FALSE,
separate_trajectories = TRUE,
max_frame_gap = "autodetect",
get_full_trajectories = TRUE,
span = 0.95
)
#> autodetect is an experimental feature -- please report issues.
## Quick plot
## Colors correspond to unique trajectories (file_sub_traj)
motive_allinone %>%
ggplot(aes(x = position_length, y = position_width,
fill = file_sub_traj)) +
geom_point(pch = 21) +
coord_fixed() +
theme_classic() +
theme(
legend.position = "none"
)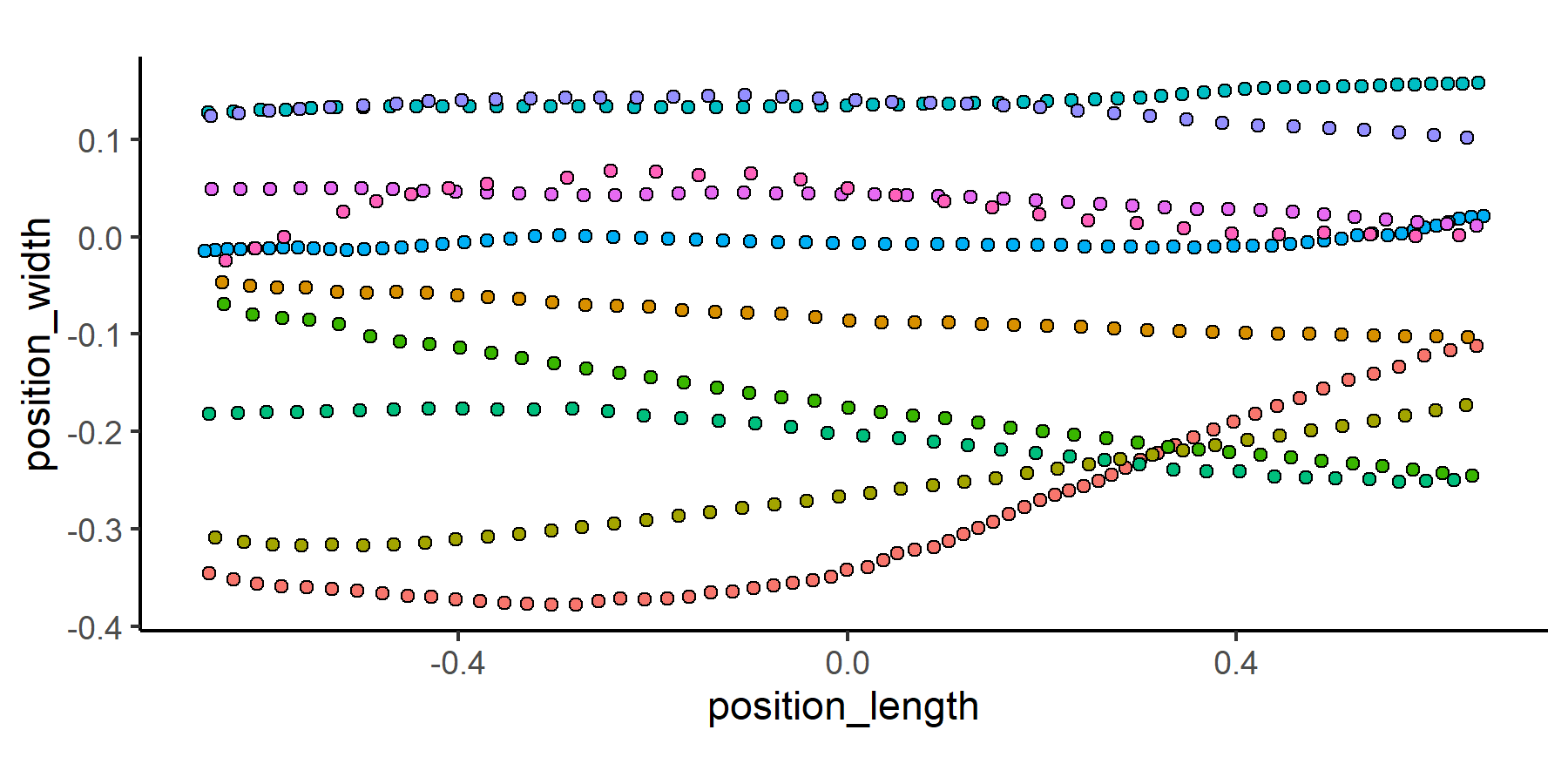
To get a sense of what we’ve done, compare the data before and after it has passed through the pipeline.
## Check out the data's structure before cleaning and wrangling:
str(motive_data)
#> tibble [934 × 26] (S3: tbl_df/tbl/data.frame)
#> $ frame : int [1:934] 72210 72211 72212 72213 72214 72215 72216 72217 72218 72219 ...
#> $ time_sec : num [1:934] 722 722 722 722 722 ...
#> $ device02_rotation_x : num [1:934] 0.1346 0.0819 0.2106 0.1961 0.1305 ...
#> $ device02_rotation_y : num [1:934] -0.977 -0.978 -0.973 -0.972 -0.975 ...
#> $ device02_rotation_z : num [1:934] -0.1117 -0.0991 -0.0939 -0.1275 -0.1213 ...
#> $ device02_rotation_w : num [1:934] 0.1215 0.1654 0.0311 0.0351 0.1315 ...
#> $ device02_position_x : num [1:934] 0.142 0.137 0.125 0.118 0.113 ...
#> $ device02_position_y : num [1:934] 0.16 0.164 0.166 0.168 0.173 ...
#> $ device02_position_z : num [1:934] 2 1.97 1.95 1.92 1.89 ...
#> $ device02_mean_marker_error: num [1:934] 0.000113 0.000105 0.000115 0.000202 0.000106 0.000095 0.000114 0.000117 0.000121 0.000131 ...
#> $ device03_rotation_x : num [1:934] 0.107 0.111 0.109 0.109 0.108 ...
#> $ device03_rotation_y : num [1:934] -0.295 -0.295 -0.295 -0.295 -0.295 ...
#> $ device03_rotation_z : num [1:934] -0.088 -0.0866 -0.0853 -0.0853 -0.0879 ...
#> $ device03_rotation_w : num [1:934] 0.945 0.945 0.945 0.945 0.945 ...
#> $ device03_position_x : num [1:934] 0.222 0.222 0.222 0.222 0.222 ...
#> $ device03_position_y : num [1:934] 0.245 0.245 0.245 0.245 0.245 ...
#> $ device03_position_z : num [1:934] 0.0597 0.0597 0.0598 0.0598 0.0598 ...
#> $ device03_mean_marker_error: num [1:934] 0.000166 0.000172 0.000164 0.000163 0.000162 0.000162 0.000169 0.00017 0.00017 0.000213 ...
#> $ device05_rotation_x : num [1:934] 0.00672 0.00714 0.00709 0.00742 0.00826 ...
#> $ device05_rotation_y : num [1:934] 0.944 0.944 0.944 0.944 0.944 ...
#> $ device05_rotation_z : num [1:934] -0.117 -0.116 -0.118 -0.118 -0.117 ...
#> $ device05_rotation_w : num [1:934] 0.308 0.308 0.309 0.31 0.308 ...
#> $ device05_position_x : num [1:934] 0.173 0.173 0.173 0.173 0.173 ...
#> $ device05_position_y : num [1:934] 0.243 0.243 0.243 0.243 0.243 ...
#> $ device05_position_z : num [1:934] 2.66 2.66 2.66 2.66 2.66 ...
#> $ device05_mean_marker_error: num [1:934] 0.000241 0.000247 0.000255 0.000244 0.00023 0.000226 0.000231 0.000236 0.000242 0.000263 ...
#> - attr(*, ".internal.selfref")=<externalptr>
#> - attr(*, "pathviewr_steps")= chr "viewr"
#> - attr(*, "file_id")= chr "pathviewr_motive_example_data.csv"
#> - attr(*, "file_mtime")= POSIXct[1:1], format: "2022-08-19 14:30:37"
#> - attr(*, "frame_rate")= num 100
#> - attr(*, "header")='data.frame': 11 obs. of 2 variables:
#> ..$ metadata: chr [1:11] "Format Version" "Take Name" "Take Notes" "Capture Frame Rate" ...
#> ..$ value : chr [1:11] "1.23" "sept-18_mixed-group_16-30" "" "100.000000" ...
#> - attr(*, "Motive_IDs")= chr [1:24] "\"9E207518D8A311E969D7AB6B1FACE49B\"" "\"9E207518D8A311E969D7AB6B1FACE49B\"" "\"9E207518D8A311E969D7AB6B1FACE49B\"" "\"9E207518D8A311E969D7AB6B1FACE49B\"" ...
#> - attr(*, "subject_names_full")= chr [1:24] "device02" "device02" "device02" "device02" ...
#> - attr(*, "subject_names_simple")= chr [1:3] "device02" "device03" "device05"
#> - attr(*, "data_names")= chr [1:26] "frame" "time_sec" "device02_rotation_x" "device02_rotation_y" ...
#> - attr(*, "data_types_full")= chr [1:24] "Rigid Body" "Rigid Body" "Rigid Body" "Rigid Body" ...
#> - attr(*, "data_types_simple")= chr "Rigid Body"
#> - attr(*, "d1")= chr [1:26] "" "" "Rotation" "Rotation" ...
#> - attr(*, "d2")= chr [1:26] "Frame" "Time (Seconds)" "X" "Y" ...
#> - attr(*, "import_method")= chr "motive"
## Check out the data's structure after cleaning and wrangling:
str(motive_allinone)
#> tibble [449 × 24] (S3: tbl_df/tbl/data.frame)
#> $ frame : int [1:449] 72213 72214 72215 72216 72217 72218 72219 72220 72221 72222 ...
#> $ time_sec : num [1:449] 722 722 722 722 722 ...
#> $ subject : chr [1:449] "device02" "device02" "device02" "device02" ...
#> $ position_length : num [1:449] 0.647 0.62 0.593 0.567 0.541 ...
#> $ position_width : num [1:449] -0.112 -0.116 -0.122 -0.134 -0.141 ...
#> $ position_height : num [1:449] -0.0371 -0.0324 -0.0273 -0.0235 -0.0209 ...
#> $ rotation_length : num [1:449] -0.128 -0.121 -0.105 -0.106 -0.149 ...
#> $ rotation_width : num [1:449] 0.1961 0.1305 0.0935 0.1798 0.164 ...
#> $ rotation_height : num [1:449] -0.972 -0.975 -0.975 -0.975 -0.972 ...
#> $ rotation_real : num [1:449] 0.0351 0.1315 0.1734 0.0807 0.0824 ...
#> $ mean_marker_error: num [1:449] 0.000202 0.000106 0.000095 0.000114 0.000117 0.000121 0.000131 0.00014 0.000113 0.000114 ...
#> $ velocity : num [1:449] 2.73 2.78 2.84 2.85 2.68 ...
#> $ length_inst_vel : num [1:449] -2.65 -2.72 -2.74 -2.58 -2.56 ...
#> $ width_inst_vel : num [1:449] -0.642 -0.387 -0.58 -1.139 -0.75 ...
#> $ height_inst_vel : num [1:449] 0.184 0.475 0.508 0.379 0.258 ...
#> $ traj_id : int [1:449] 0 0 0 0 0 0 0 0 0 0 ...
#> $ file_sub_traj : chr [1:449] "pathviewr_motive_example_data.csv_device02_0" "pathviewr_motive_example_data.csv_device02_0" "pathviewr_motive_example_data.csv_device02_0" "pathviewr_motive_example_data.csv_device02_0" ...
#> $ traj_length : int [1:449] 63 63 63 63 63 63 63 63 63 63 ...
#> $ start_length : num [1:449] 0.647 0.647 0.647 0.647 0.647 ...
#> $ end_length : num [1:449] -0.656 -0.656 -0.656 -0.656 -0.656 ...
#> $ length_diff : num [1:449] 1.3 1.3 1.3 1.3 1.3 ...
#> $ start_length_sign: num [1:449] 1 1 1 1 1 1 1 1 1 1 ...
#> $ end_length_sign : num [1:449] -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 ...
#> $ direction : chr [1:449] "leftwards" "leftwards" "leftwards" "leftwards" ...
#> - attr(*, "file_id")= chr "pathviewr_motive_example_data.csv"
#> - attr(*, "file_mtime")= POSIXct[1:1], format: "2022-08-19 14:30:37"
#> - attr(*, "frame_rate")= num 100
#> - attr(*, "header")='data.frame': 11 obs. of 2 variables:
#> ..$ metadata: chr [1:11] "Format Version" "Take Name" "Take Notes" "Capture Frame Rate" ...
#> ..$ value : chr [1:11] "1.23" "sept-18_mixed-group_16-30" "" "100.000000" ...
#> - attr(*, "Motive_IDs")= chr [1:24] "\"9E207518D8A311E969D7AB6B1FACE49B\"" "\"9E207518D8A311E969D7AB6B1FACE49B\"" "\"9E207518D8A311E969D7AB6B1FACE49B\"" "\"9E207518D8A311E969D7AB6B1FACE49B\"" ...
#> - attr(*, "subject_names_full")= chr [1:24] "device02" "device02" "device02" "device02" ...
#> - attr(*, "subject_names_simple")= chr [1:3] "device02" "device03" "device05"
#> - attr(*, "data_names")= chr [1:26] "frame" "time_sec" "device02_rotation_x" "device02_rotation_y" ...
#> - attr(*, "data_types_full")= chr [1:24] "Rigid Body" "Rigid Body" "Rigid Body" "Rigid Body" ...
#> - attr(*, "data_types_simple")= chr "Rigid Body"
#> - attr(*, "d1")= chr [1:26] "" "" "Rotation" "Rotation" ...
#> - attr(*, "d2")= chr [1:26] "Frame" "Time (Seconds)" "X" "Y" ...
#> - attr(*, "import_method")= chr "motive"
#> - attr(*, "pathviewr_steps")= chr [1:10] "viewr" "renamed_tunnel" "gathered_tunnel" "artifacts_removed" ...
#> - attr(*, "perch1_midpoint_original")= num [1:3] 0 0.2 0.205
#> - attr(*, "perch2_midpoint_original")= num [1:3] 2.54 0.24 0.205
#> - attr(*, "tunnel_centerpoint_original")= num [1:3] 1.27 0.22 0.205
#> - attr(*, "rotation_degrees")= num 0.902
#> - attr(*, "rotation_radians")= num 0.0157
#> - attr(*, "perch1_midpoint_current")= num [1:3] -1.27 4.65e-15 2.05e-01
#> - attr(*, "perch2_midpoint_current")= num [1:3] 1.27 -4.65e-15 2.05e-01
#> - attr(*, "percent_selected")= num 50
#> - attr(*, "full_tunnel_length")= num 2.64
#> - attr(*, "selected_tunnel_length")= num 1.32
#> - attr(*, "max_frame_gap")= int [1:3] 1 1 2
#> - attr(*, "span")= num 0.95
#> - attr(*, "trajectories_removed")= int 5An important aspect of how pathviewr defines
trajectories is by managing gaps in the data. See
the vignette on Managing frame gaps for more information on
trajectory definition and frame gaps.
Now that the data is cleaned, pathviewr includes
functions that estimate visual perceptions based on the distance between
the subject/observer and visual stimuli on the walls of the experimental
tunnel. For a complete description of these functions, see
the vignette on Estimating visual perceptions from tracking
data.
Now that our objects have been cleaned, we will use
insert_treatments() to add information about the
experiments that are necessary for calculating visual perceptions.
The data from this example were recorded in a V-shaped tunnel. Accordingly, the vertex angle and vertex height of the tunnel, along with information about the visual stimuli used during the experiment, will be added to the data to inform calculations of visual perception (next section).
motive_V <-
motive_allinone %>%
insert_treatments(
tunnel_config = "v",
perch_2_vertex = 0.4,
vertex_angle = 90,
tunnel_length = 2,
stim_param_lat_pos = 0.1,
stim_param_lat_neg = 0.1,
stim_param_end_pos = 0.3,
stim_param_end_neg = 0.3,
treatment = "lat10_end_30"
) To calculate the spatial frequency of the visual stimuli as perceived
by the subject some distance from the stimuli, we will use
get_sf().
This will require two intermediate steps: 1) calculating the minimum
distance between a subject and each wall (via
calc_min_dist_v()) and 2) estimating the visual angles from
the subject’s perspective (get_vis_angle()).
motive_V_sf <-
motive_V %>%
calc_min_dist_v(simplify_output = TRUE) %>%
get_vis_angle() %>%
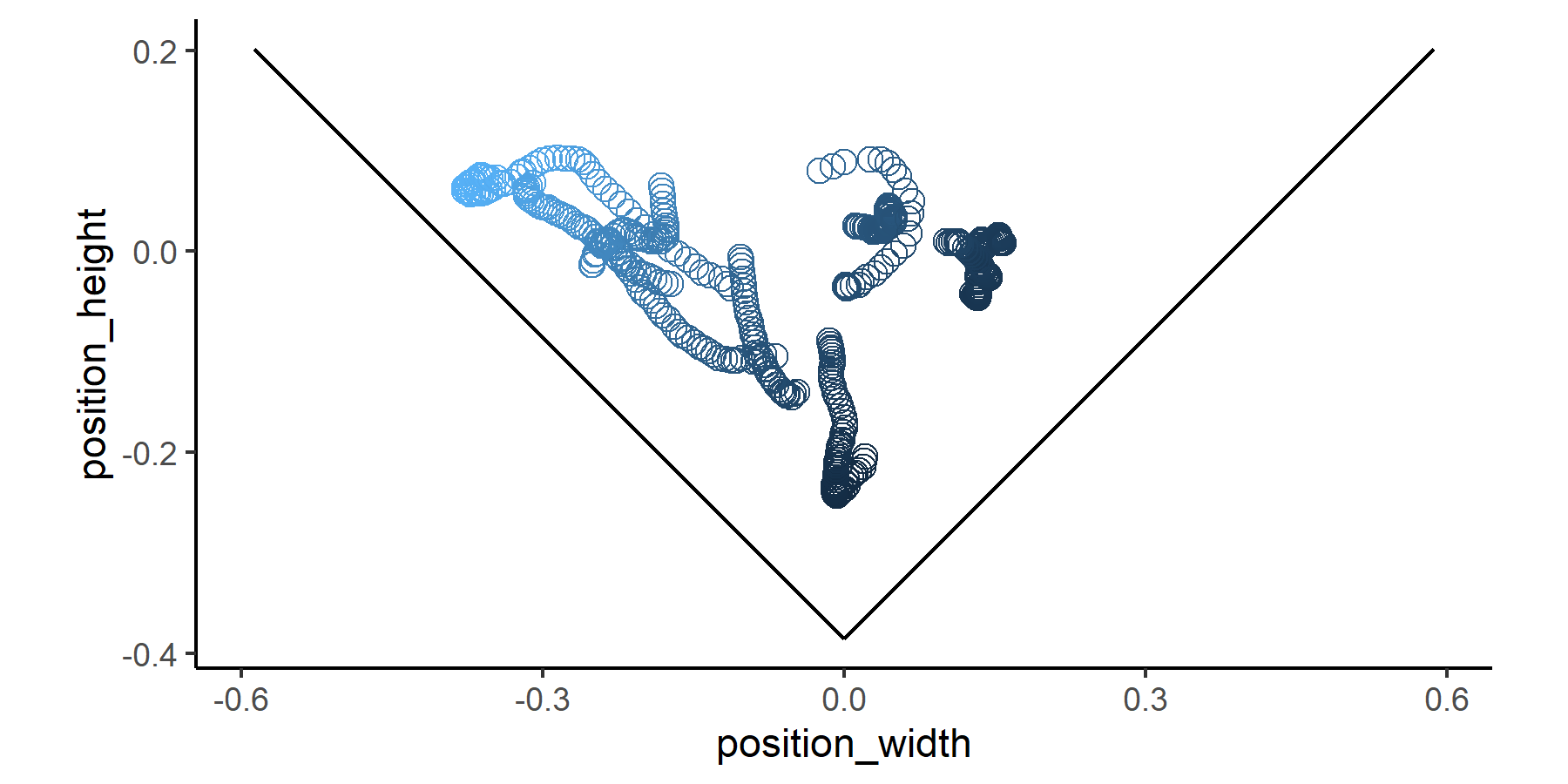
get_sf()Visualizing the calculations provides an more intuitive understanding of how these visual perceptions change as the subject moves throughout the tunnel. Please see the vignette on Estimating visual perceptions from tracking data for more examples of visualizing calculations.
ggplot(motive_V_sf, aes(x = position_width, y = position_height)) +
geom_point(aes(color = sf_pos), shape=1, size=3) +
geom_segment(aes(x = 0, # dimensions of the positive wall
y = -0.3855,
xend = 0.5869,
yend = 0.2014)) +
geom_segment(aes(x = 0, # dimensions of the negative wall
y = -0.3855,
xend = -0.5869,
yend = 0.2014)) +
coord_fixed() +
theme_classic() +
theme(
legend.position = "none"
)
We welcome feedback on bugs, improvements, and/or feature requests. Please see our Issues templates on GitHub to make a bug fix request or feature request.
To contribute code via a pull request, please consult our Contributing Guide first.
The preferred way to cite pathviewr (but subject to
change) is:
Baliga VB, Armstrong MS, Press ER (2021). pathviewr: Tools to import, clean, and visualize animal movement data in R. R package version 1.1.3, https://github.com/ropensci/pathviewr. doi: 10.5281/zenodo.4270187
GPL (>= 3) + file LICENSE
🐢