R
package pomdp: Partially Observable Markov Decision Processes



Provides the infrastructure to define and analyze the solutions of
Partially Observable Markov Decision Processes (POMDP) models. The
package uses the solvers from pomdp-solve (Cassandra, 2015)
available in the R package pomdpSolve
to solve POMDPs using a variety of algorithms.
The package provides the following algorithms:
- Exact value iteration
- Enumeration algorithm (Sondik 1971, Mohan
1982).
- Two pass algorithm (Sondik 1971).
- Witness algorithm (Littman, Cassandra, Kaelbling
1996).
- Incremental pruning algorithm (Zhang and Liu 1996,
Cassandra et al 1997).
- Approximate value iteration
- Finite grid algorithm (Cassandra 2015), a variation
of point-based value iteration to solve larger POMDPs
(PBVI; see Pineau 2003) without dynamic belief set
expansion.
- SARSOP (Kurniawati, Hsu and Lee 2008), point-based
algorithm that approximates optimally reachable belief spaces for
infinite-horizon problems (via package sarsop).
Installation
Stable CRAN version: install from within R with
install.packages("pomdp")
Current development version: install from GitHub
(needs devtools).
devtools::install_github("mhahsler/pomdp")
Usage
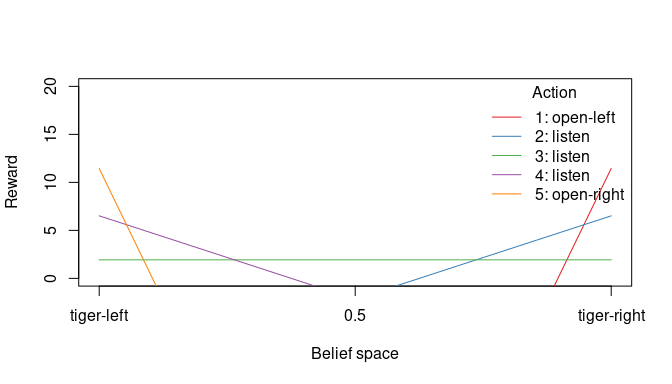
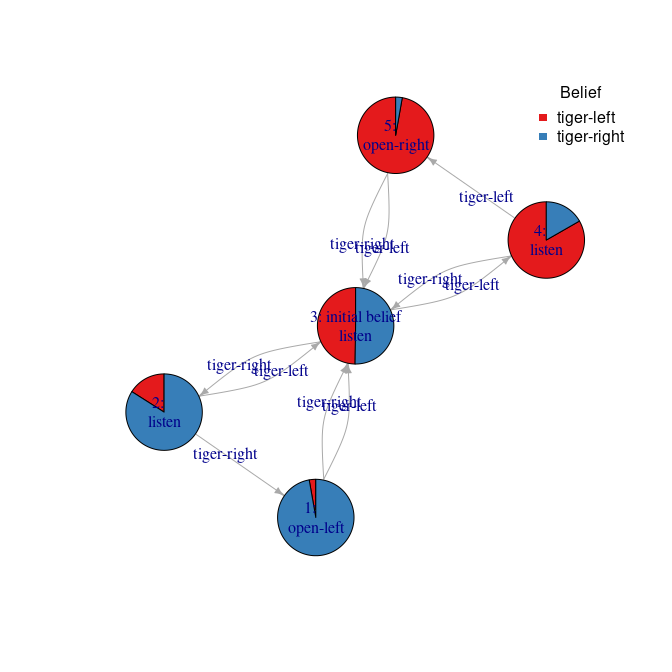
Solving the simple infinite-horizon Tiger problem.
library("pomdp")
data("Tiger")
Tiger
## POMDP, list - Tiger Problem
## Discount factor: 0.75
## Horizon: Inf epochs
## List components: 'name', 'discount', 'horizon', 'states', 'actions',
## 'observations', 'transition_prob', 'observation_prob', 'reward',
## 'start', 'terminal_values'
sol <- solve_POMDP(model = Tiger)
sol
## POMDP, list - Tiger Problem
## Discount factor: 0.75
## Horizon: Inf epochs
## Solved:
## Solution converged: TRUE
## Total expected reward: 1.933439
## List components: 'name', 'discount', 'horizon', 'states', 'actions',
## 'observations', 'transition_prob', 'observation_prob', 'reward',
## 'start', 'solution', 'solver_output'
plot_value_function(sol, ylim = c(0, 20))
References
- Cassandra, A. (2015). pomdp-solve: POMDP Solver Software, http://www.pomdp.org.
- Sondik, E. (1971). The Optimal Control of Partially Observable
Markov Processes. Ph.D. Dissertation, Stanford University.
- Cassandra, A., Littman M.L., Zhang L. (1997). Incremental Pruning: A
Simple, Fast, Exact Algorithm for Partially Observable Markov Decision
Processes. UAI’97: Proceedings of the Thirteenth conference on
Uncertainty in artificial intelligence, August 1997, pp. 54-61.
- Monahan, G. E. (1982). A survey of partially observable Markov
decision processes: Theory, models, and algorithms. Management Science
28(1):1-16.
- Littman, M. L.; Cassandra, A. R.; and Kaelbling, L. P. (1996).
Efficient dynamic-programming updates in partially observable Markov
decision processes. Technical Report CS-95-19, Brown University,
Providence, RI.
- Zhang, N. L., and Liu, W. (1996). Planning in stochastic domains:
Problem characteristics and approximation. Technical Report
HKUST-CS96-31, Department of Computer Science, Hong Kong University of
Science and Technology.
- Pineau, J., Gordon, G.J., Thrun, S.B. (2003). Point-based value
iteration: an anytime algorithm for POMDPs. IJCAI’03: Proceedings of the
18th international joint conference on Artificial Intelligence. Pages
1025-1030.
- Kurniawati, H., Hsu, D., and Lee, W.S. (2008). SARSOP: Efficient
point-based POMDP planning by approximating optimally reachable belief
spaces. In Proc. Robotics: Science and Systems.
Acknowledgments
Development of this package was supported in part by National
Institute of Standards and Technology (NIST) under grant number 60NANB17D180.